GLAST/LAT > DAQ and FSW > FSW > Doxygen Index > LIM / V1-20-0
Constituent: lim Tag: mv2304
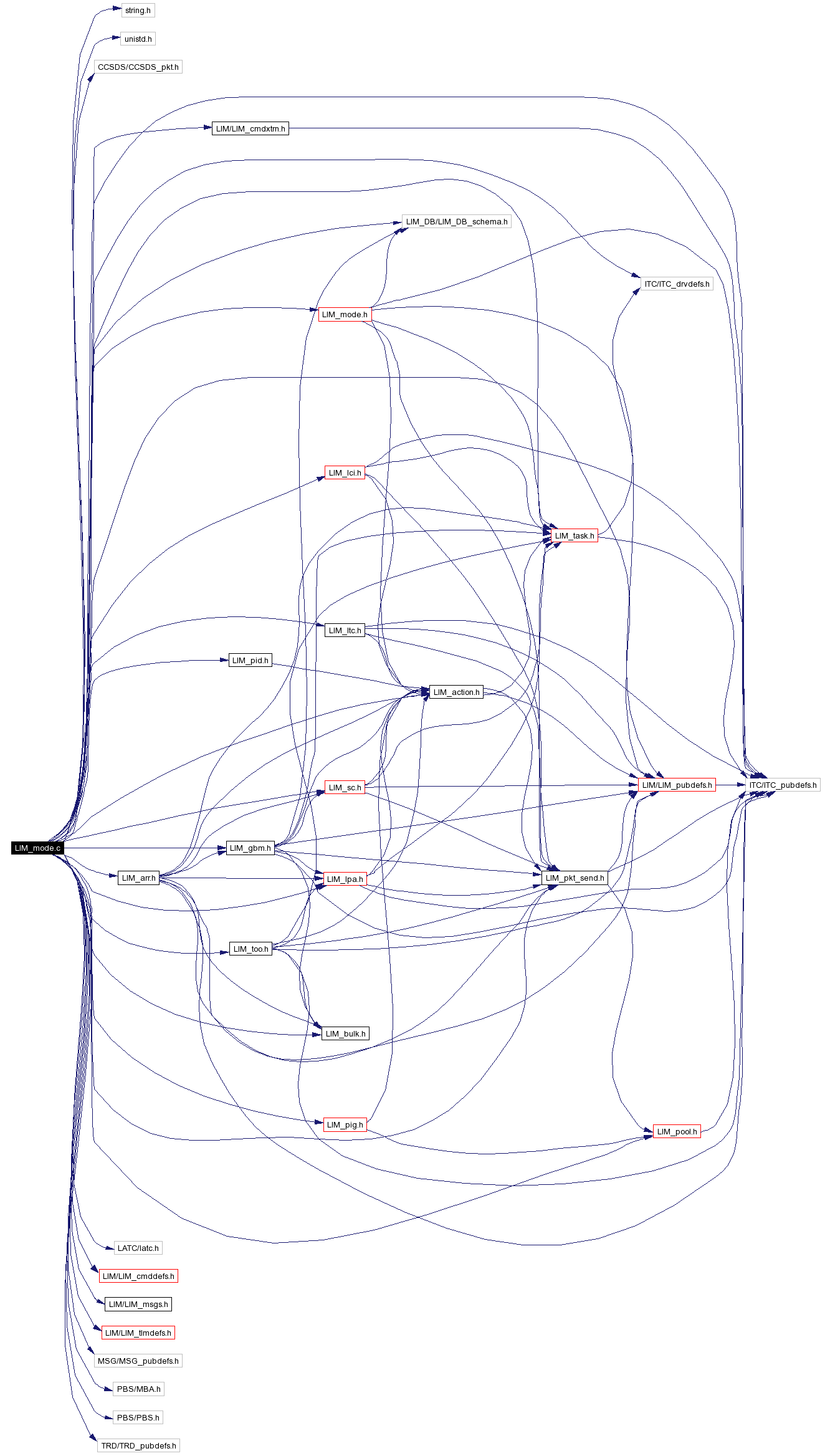
#include "string.h"
#include "unistd.h"
#include "CCSDS/CCSDS_pkt.h"
#include "ITC/ITC_drvdefs.h"
#include "ITC/ITC_pubdefs.h"
#include "LATC/latc.h"
#include "LIM/LIM_cmddefs.h"
#include "LIM/LIM_cmdxtrn.h"
#include "LIM/LIM_msgs.h"
#include "LIM/LIM_pubdefs.h"
#include "LIM/LIM_tlmdefs.h"
#include "LIM_DB/LIM_DB_schema.h"
#include "MSG/MSG_pubdefs.h"
#include "PBS/MBA.h"
#include "PBS/PBS.h"
#include "TRD/TRD_pubdefs.h"
#include "LIM_action.h"
#include "LIM_arr.h"
#include "LIM_bulk.h"
#include "LIM_gbm.h"
#include "LIM_lci.h"
#include "LIM_lpa.h"
#include "LIM_ltc.h"
#include "LIM_mode.h"
#include "LIM_pid.h"
#include "LIM_pig.h"
#include "LIM_pkt_send.h"
#include "LIM_pool.h"
#include "LIM_sc.h"
#include "LIM_task.h"
#include "LIM_too.h"
Include dependency graph for LIM_mode.c:
Data Structures | |
| struct | _Lim_Mode_Handler |
| Info related to handling a LIM command in a particular mode. More... | |
| struct | _Lim_Mode_Command |
| Info related to handling a LIM command. More... | |
| struct | _LIM_Mode |
| State information for a LIM mode object. More... | |
Defines | |
| #define | LIM_MODE_VALID_KEY (('L'<<24)+('M'<<16)+('O'<<8)+'D') |
| Value that indicates LIM mode object state is valid. | |
| #define | LIM_K_RESET_FORMAT_0 (0) |
| Format of global reset data being written out. | |
Typedefs | |
| typedef unsigned int(* | Lim_Cmd_Handler )(LIM_Mode *mode_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Signature of a command handler function. | |
| typedef _Lim_Mode_Handler | Lim_Mode_Handler |
| Typedef for _Lim_Mode_Handler. | |
| typedef _Lim_Mode_Command | Lim_Mode_Command |
| Typedef for _Lim_Mode_Command. | |
Functions | |
| static unsigned int | lim_mode_check (LIM_Mode *object_p) |
| Validate a LIM mode object pointer. | |
| static unsigned int | lim_mode_change_hv_allowed (LIM_Mode *object_p, int new_value) |
| Change the value of the HV-Allowed flag. | |
| static unsigned int | lim_mode_change_saa (LIM_Mode *object_p, int new_status) |
| Change the current SAA transit status. | |
| unsigned int | LIM_mode_new (LIM_Mode **object_pp, LIM_Task *task_p, LIM_Pkt_Send *cal_start_p, LIM_Pkt_Send *cal_abort_p, LIM_Pkt_Send *diag_start_p, LIM_Pkt_Send *diag_abort_p, LIM_Pkt_Send *gbm_calcinfo_p, LIM_Pkt_Send *gbm_closeout_p, LIM_Pkt_Send *gbm_repoint_p, LIM_Pkt_Send *ltc_stop_p, LIM_Pkt_Send *physics_start_p, LIM_Pkt_Send *physics_stop_p, LIM_Pkt_Send *slew_req_cmd_p, LIM_Pkt_Send *slew_req_tlm_p, LIM_Pkt_Send *slew_rsp_tlm_p, LIM_Pkt_Send *shed_alert_tlm_p, LIM_Action *action_p, LIM_Pool *pool_p, const LIM_DB_Schema *db_p) |
| Create and initialize a new mode object. | |
| unsigned int | LIM_mode_delete (LIM_Mode *object_p) |
| Shutdown and delete a mode object. | |
| unsigned int | LIM_mode_get_info (LIM_Mode *object_p, LIM_Info *info_p) |
| Return mode information. | |
| static void | lim_mode_wait_for_complete (void) |
| Allow time for a task to respond to a stop/abort command. | |
| static unsigned int | lim_mode_stop_activity (LIM_Mode *object_p) |
| Stop any ongoing LCI, LDF, LPA, and LTC activity. | |
| static unsigned int | lim_mode_change_op_mode (LIM_Mode *object_p, LIM_Operating_Mode new_mode) |
| Change the current operating mode. | |
| static unsigned int | lim_mode_handle_cal (LIM_Mode *object_p, LIM_Operating_Mode target_mode) |
| Perform actions for the CALIBRATION operating mode. | |
| static unsigned int | lim_mode_handle_hold (LIM_Mode *object_p, LIM_Operating_Mode target_mode) |
| Perform actions for the HOLD operating mode. | |
| static unsigned int | lim_mode_handle_obs (LIM_Mode *object_p, LIM_Operating_Mode target_mode) |
| Perform actions for one of the observation operating modes. | |
| static unsigned int | lim_mode_handle_quiescent (LIM_Mode *object_p, LIM_Operating_Mode target_mode) |
| Perform actions for the QUIESCENT operating mode. | |
| static unsigned int | lim_mode_handle_terminal (LIM_Mode *object_p, LIM_Operating_Mode target_mode) |
| Perform actions for the TERMINAL operating mode. | |
| static LIM_Operating_Mode | lim_mode_target_mode (LIM_Mode *object_p) |
| Determine the next desired operation mode. | |
| static unsigned int | lim_mode_handle_op_mode (LIM_Mode *object_p) |
| Perform actions within the various operating modes. | |
| static unsigned int | lim_mode_handle_command (void *prm, const ITC_QueueItem *qitem_p, Lim_Mode_Command *cmd_p, LIM_Pkt_Send *pkt_send_p) |
| Generic command handler. | |
| static unsigned int | lim_mode_arr_abort (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle an ARR-Abort command. | |
| unsigned int | LIM_ARR_Abort (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM ARR-Abort command. | |
| static unsigned int | lim_mode_arr_response (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle an ARR-Response message. | |
| unsigned int | LIM_ARR_Response (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM ARR-Response command. | |
| static unsigned int | lim_mode_bias_acd (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Configure ACD bias voltages. | |
| unsigned int | LIM_Bias_ACD (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Bias-ACD command. | |
| static unsigned int | lim_mode_bias_cal (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Configure CAL bias voltages. | |
| unsigned int | LIM_Bias_CAL (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Bias-CAL command. | |
| static unsigned int | lim_mode_bias_tkr (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Configure TKR bias voltages. | |
| unsigned int | LIM_Bias_TKR (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Bias-TKR command. | |
| static unsigned int | lim_mode_bulk (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle a message on the BULK queue. | |
| static unsigned int | lim_mode_handle_bulk (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle the BULK queue messages. | |
| static unsigned int | lim_mode_cal_abort (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Abort a calibration. | |
| unsigned int | LIM_mode_handle_cal_abort (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle the Cal-Abort command. | |
| static unsigned int | lim_mode_cal_complete (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle a calibration completion message. | |
| static unsigned int | lim_mode_handle_cal_complete (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle the Cal-Complete message. | |
| static unsigned int | lim_mode_cal_active (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle an 'active' calibration command. | |
| unsigned int | LIM_mode_handle_cal_active (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle an 'active' calibration command. | |
| static unsigned int | lim_mode_cal_start (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Start a calibration. | |
| unsigned int | LIM_mode_handle_cal_start (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle the Cal-Start command. | |
| static unsigned int | lim_mode_config_gbm (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle the Configure-GBM command. | |
| unsigned int | LIM_Config_GBM (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Config-GBM command. | |
| static unsigned int | lim_mode_config_hv (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle the Configure-HV command. | |
| unsigned int | LIM_Config_HV (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Config-HV command. | |
| static unsigned int | lim_mode_config_pid (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle the Configure-PID command. | |
| unsigned int | LIM_Config_PID (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Config-PID command. | |
| static unsigned int | lim_mode_gbm_calcinfo (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle the GBM-Calcinfo command. | |
| unsigned int | LIM_mode_handle_gbm_calcinfo (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle the GBM-Calcinfo command. | |
| static unsigned int | lim_mode_gbm_closeout (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle the GBM-Closeout command. | |
| unsigned int | LIM_mode_handle_gbm_closeout (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle the GBM-Closeout command. | |
| static unsigned int | lim_mode_gbm_repoint (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle a GBM-Repoint command. | |
| unsigned int | LIM_mode_handle_gbm_repoint (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle a GBM-Repoint command. | |
| static unsigned int | lim_mode_grb_confirmed (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle the GRB-Confirmed command. | |
| static unsigned int | lim_mode_grb_finished (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle the GRB-Finished command. | |
| static unsigned int | lim_mode_grb_suspected (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle the GRB-Suspected command. | |
| static unsigned int | lim_mode_hold_enter (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Enter the HOLD operating mode. | |
| unsigned int | LIM_Hold_Enter (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Hold-Enter command. | |
| static unsigned int | lim_mode_hold_exit (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Exit the HOLD operating mode. | |
| unsigned int | LIM_Hold_Exit (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Hold-Exit command. | |
| static unsigned int | lim_mode_latc_config (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Call the LATC_cache, LATC_configure, and LATC_ignore functions. | |
| unsigned int | LIM_Latc_Config (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Latc-Config command. | |
| static unsigned int | lim_mode_latc_record (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Call the LATC_capture() and LATC_consign() functions. | |
| unsigned int | LIM_Latc_Record (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Latc-Record command. | |
| static unsigned int | lim_mode_latc_verify (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Call the LATC_capture, LATC_verify, and LATC_consign functions. | |
| unsigned int | LIM_Latc_Verify (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Latc-Verify command. | |
| static unsigned int | lim_mode_load_shed (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Shed LAT instrument loads. | |
| unsigned int | LIM_Load_Shed (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Load-Shed command. | |
| static unsigned int | lim_mode_look_at_me (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Send the Look-At-Me command. | |
| unsigned int | LIM_Look_At_Me (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Look-At-Me command. | |
| static unsigned int | lim_mode_main_feed_on (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Enable the main power feed and transition to QUIESCENT mode. | |
| unsigned int | LIM_Main_Feed_On (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Main-Feed-On command. | |
| static unsigned int | lim_mode_noop (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Acknowledge our existence. | |
| unsigned int | LIM_Noop (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM No-op command. | |
| static unsigned int | lim_mode_physics_active (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle an 'active' physics command. | |
| unsigned int | LIM_mode_handle_physics_active (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle an 'active' physics command. | |
| static unsigned int | lim_mode_physics_complete (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle a Physics-Complete command. | |
| static unsigned int | lim_mode_physics_idle (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle an 'idle' physics command. | |
| unsigned int | LIM_mode_handle_physics_idle (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle an 'idle' physics command. | |
| static unsigned int | lim_mode_physics_start (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle a Physics-Start command. | |
| unsigned int | LIM_mode_handle_physics_start (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle the Physics-Start command. | |
| static unsigned int | lim_mode_physics_stop (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle a Physics-Stop command. | |
| unsigned int | LIM_mode_handle_physics_stop (LIM_Mode *object_p, LIM_Pkt_Send *pkt_send_p, const ITC_QueueItem *qitem_p) |
| Handle the Physics-Stop command. | |
| static unsigned int | lim_mode_pig_record (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Call the PIG_record() function. | |
| unsigned int | LIM_Pig_Record (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Pig-Record command. | |
| static unsigned int | lim_mode_power_off (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Disable power from one or more LAT instrument components. | |
| unsigned int | LIM_Power_Off (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Power-Off command. | |
| static unsigned int | lim_mode_power_on (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Enable power to one or more LAT instrument components. | |
| unsigned int | LIM_Power_On (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM Power-On command. | |
| static unsigned int | lim_mode_saa_enter (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Enter the SAA. | |
| unsigned int | LIM_SAA_Enter (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM SAA-Enter command. | |
| static unsigned int | lim_mode_saa_exit (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Exit the SAA. | |
| unsigned int | LIM_SAA_Exit (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM SAA-Exit command. | |
| static unsigned int | lim_mode_too_abort (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Handle a TOO-Abort command. | |
| unsigned int | LIM_TOO_Abort (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM TOO-Abort command. | |
| static unsigned int | lim_mode_too_start (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, LIM_Pkt_Send *pkt_send_p) |
| Start a TOO observation. | |
| unsigned int | LIM_TOO_Start (void *prm, const struct _ITC_QueueItem *qitem, void *pay, unsigned int len) |
| Handle the LIM TOO-Start command. | |
| static unsigned int | lim_mode_handle_lpa_bulk (LIM_Mode *object_p, const ITC_QueueItem *qitem_p, void *pay_p, unsigned int len) |
| Handle messages arriving on the BULK queue from the LPA task. | |
| unsigned int | LIM_mode_handle_bulk (void *prm, const ITC_QueueItem *qitem_p, void *pay_p, unsigned int len) |
| Handle messages arriving on the BULK queue. | |
| void | LIM_cb_reset (unsigned short fmt, unsigned short len, const void *dat) |
| Restore main feed on context after turbo reset. | |
Variables | |
| Lim_Mode_Handler | Lim_handler_arr_abort [] |
| Handlers for the ARR-Abort command. | |
| Lim_Mode_Command | Lim_command_arr_abort |
| Information about the ARR-Abort command. | |
| Lim_Mode_Handler | Lim_handler_arr_response [] |
| Handlers for the ARR-Response command. | |
| Lim_Mode_Command | Lim_command_arr_response |
| Information about the ARR-Response command. | |
| Lim_Mode_Handler | Lim_handler_bias_acd [] |
| Handlers for the Bias-ACD command. | |
| Lim_Mode_Command | Lim_command_bias_acd |
| Information about the Bias-ACD command. | |
| Lim_Mode_Handler | Lim_handler_bias_cal [] |
| Handlers for the Bias-CAL command. | |
| Lim_Mode_Command | Lim_command_bias_cal |
| Information about the Bias-CAL command. | |
| Lim_Mode_Handler | Lim_handler_bias_tkr [] |
| Handlers for the Bias-TKR command. | |
| Lim_Mode_Command | Lim_command_bias_tkr |
| Information about the Bias-TKR command. | |
| Lim_Mode_Handler | Lim_handler_bulk [] |
| Handlers for the BULK queue messages. | |
| Lim_Mode_Command | Lim_command_bulk |
| Information about the BULK queue messages. | |
| Lim_Mode_Handler | Lim_handler_cal_abort [] |
| Handlers for the Cal-Abort command. | |
| Lim_Mode_Command | Lim_command_cal_abort |
| Information about the Cal-Abort command. | |
| Lim_Mode_Handler | Lim_handler_cal_complete [] |
| Handlers for the Cal-Complete command. | |
| Lim_Mode_Command | Lim_command_cal_complete |
| Information about the Cal-Complete command. | |
| Lim_Mode_Handler | Lim_handler_cal_active [] |
| Handlers for 'active' calibration commands. | |
| Lim_Mode_Command | Lim_command_cal_active |
| Information about the 'active' calibration commands. | |
| Lim_Mode_Handler | Lim_handler_cal_start [] |
| Handlers for the Cal-Start command. | |
| Lim_Mode_Command | Lim_command_cal_start |
| Information about the Cal-Start command. | |
| Lim_Mode_Handler | Lim_handler_config_gbm [] |
| Handlers for the Configure-GBM command. | |
| Lim_Mode_Command | Lim_command_config_gbm |
| Information about the Configure-GBM command. | |
| Lim_Mode_Handler | Lim_handler_config_hv [] |
| Handlers for the Configure-HV command. | |
| Lim_Mode_Command | Lim_command_config_hv |
| Information about the Configure-HV command. | |
| Lim_Mode_Handler | Lim_handler_config_pid [] |
| Handlers for the Configure-PID command. | |
| Lim_Mode_Command | Lim_command_config_pid |
| Information about the Configure-PID command. | |
| Lim_Mode_Handler | Lim_handler_gbm_calcinfo [] |
| Handlers for the GBM-Calcinfo command. | |
| Lim_Mode_Command | Lim_command_gbm_calcinfo |
| Information about the GBM-Calcinfo command. | |
| Lim_Mode_Handler | Lim_handler_gbm_closeout [] |
| Handlers for the GBM-Closeout command. | |
| Lim_Mode_Command | Lim_command_gbm_closeout |
| Information about the GBM-Closeout command. | |
| Lim_Mode_Handler | Lim_handler_gbm_repoint [] |
| Handlers for GBM-Repoint command. | |
| Lim_Mode_Command | Lim_command_gbm_repoint |
| Information about the GBM-Repoint command. | |
| Lim_Mode_Handler | Lim_handler_grb_confirmed [] |
| Handlers for the GRB-Confirmed command. | |
| Lim_Mode_Command | Lim_command_grb_confirmed |
| Information about the GRB-Confirmed command. | |
| Lim_Mode_Handler | Lim_handler_grb_finished [] |
| Handlers for the GRB-Finished command. | |
| Lim_Mode_Command | Lim_command_grb_finished |
| Information about the GRB-Finished command. | |
| Lim_Mode_Handler | Lim_handler_grb_suspected [] |
| Handlers for the GRB-Suspected command. | |
| Lim_Mode_Command | Lim_command_grb_suspected |
| Information about the GRB-Suspected command. | |
| Lim_Mode_Handler | Lim_handler_hold_enter [] |
| Handlers for the Hold-Enter command. | |
| Lim_Mode_Command | Lim_command_hold_enter |
| Information about the Hold-Enter command. | |
| Lim_Mode_Handler | Lim_handler_hold_exit [] |
| Handlers for the Hold-Exit command. | |
| Lim_Mode_Command | Lim_command_hold_exit |
| Information about the Hold-Exit command. | |
| Lim_Mode_Handler | Lim_handler_latc_config [] |
| Handlers for the Latc-Config command. | |
| Lim_Mode_Command | Lim_command_latc_config |
| Information about the Latc-Config command. | |
| Lim_Mode_Handler | Lim_handler_latc_record [] |
| Handlers for the Latc-Record command. | |
| Lim_Mode_Command | Lim_command_latc_record |
| Information about the Latc-Record command. | |
| Lim_Mode_Handler | Lim_handler_latc_verify [] |
| Handlers for the Latc-Verify command. | |
| Lim_Mode_Command | Lim_command_latc_verify |
| Information about the Latc-Verify command. | |
| Lim_Mode_Handler | Lim_handler_load_shed [] |
| Handlers for the Load-Shed command. | |
| Lim_Mode_Command | Lim_command_load_shed |
| Information about the Load-Shed command. | |
| Lim_Mode_Handler | Lim_handler_look_at_me [] |
| Handlers for the Look-At-Me command. | |
| Lim_Mode_Command | Lim_command_look_at_me |
| Information about the Look-At-Me command. | |
| Lim_Mode_Handler | Lim_handler_main_feed_on [] |
| Handlers for the Main-Feed-On command. | |
| Lim_Mode_Command | Lim_command_main_feed_on |
| Information about the Main-Feed-On command. | |
| Lim_Mode_Handler | Lim_handler_noop [] |
| Handlers for the No-Op command. | |
| Lim_Mode_Command | Lim_command_noop |
| Information about the No-Op command. | |
| Lim_Mode_Handler | Lim_handler_physics_active [] |
| Handlers for 'active' physics commands. | |
| Lim_Mode_Command | Lim_command_physics_active |
| Information about the 'active' physics commands. | |
| Lim_Mode_Handler | Lim_handler_physics_complete [] |
| Handlers for the Physics-Complete command. | |
| Lim_Mode_Command | Lim_command_physics_complete |
| Information about the Physics-Complete command. | |
| Lim_Mode_Handler | Lim_handler_physics_idle [] |
| Handlers for 'idle' physics commands. | |
| Lim_Mode_Command | Lim_command_physics_idle |
| Information about the 'idle' physics commands. | |
| Lim_Mode_Handler | Lim_handler_physics_start [] |
| Handlers for the Physics-Start command. | |
| Lim_Mode_Command | Lim_command_physics_start |
| Information about the Physics-Start command. | |
| Lim_Mode_Handler | Lim_handler_physics_stop [] |
| Handlers for the Physics-Stop command. | |
| Lim_Mode_Command | Lim_command_physics_stop |
| Information about the Physics-Stop command. | |
| Lim_Mode_Handler | Lim_handler_pig_record [] |
| Handlers for the Pig-Record command. | |
| Lim_Mode_Command | Lim_command_pig_record |
| Information about the Pig-Record command. | |
| Lim_Mode_Handler | Lim_handler_power_off [] |
| Handlers for the Power-Off command. | |
| Lim_Mode_Command | Lim_command_power_off |
| Information about the Power-Off command. | |
| Lim_Mode_Handler | Lim_handler_power_on [] |
| Handlers for the Power-On command. | |
| Lim_Mode_Command | Lim_command_power_on |
| Information about the Power-On command. | |
| Lim_Mode_Handler | Lim_handler_saa_enter [] |
| Handlers for the SAA-Enter command. | |
| Lim_Mode_Command | Lim_command_saa_enter |
| Information about the SAA-Enter command. | |
| Lim_Mode_Handler | Lim_handler_saa_exit [] |
| Handlers for the SAA-Exit command. | |
| Lim_Mode_Command | Lim_command_saa_exit |
| Information about the SAA-Exit command. | |
| Lim_Mode_Handler | Lim_handler_too_abort [] |
| Handlers for the TOO-Abort command. | |
| Lim_Mode_Command | Lim_command_too_abort |
| Information about the TOO-Abort command. | |
| Lim_Mode_Handler | Lim_handler_too_start [] |
| Handlers for the TOO-Start command. | |
| Lim_Mode_Command | Lim_command_too_start |
| Information about the TOO-Start command. | |
** CVS $Id: LIM_mode.c,v 1.48 2008/10/29 22:36:33 apw Exp $ **
These are functions related to transitioning between the various operating and virtual modes of the LAT instrument.
|
||||||||||||||||||||
|
Handle the LIM ARR-Abort command.
|
|
||||||||||||||||||||
|
Handle the LIM ARR-Response command.
|
|
||||||||||||||||||||
|
Handle the LIM Bias-ACD command.
|
|
||||||||||||||||||||
|
Handle the LIM Bias-CAL command.
|
|
||||||||||||||||||||
|
Handle the LIM Bias-TKR command.
|
|
||||||||||||||||
|
Restore main feed on context after turbo reset.
|
|
||||||||||||||||||||
|
Handle the LIM Config-GBM command.
|
|
||||||||||||||||||||
|
Handle the LIM Config-HV command.
|
|
||||||||||||||||||||
|
Handle the LIM Config-PID command.
|
|
||||||||||||||||||||
|
Handle the LIM Hold-Enter command.
|
|
||||||||||||||||||||
|
Handle the LIM Hold-Exit command.
|
|
||||||||||||||||||||
|
Handle the LIM Latc-Config command.
|
|
||||||||||||||||||||
|
Handle the LIM Latc-Record command.
|
|
||||||||||||||||||||
|
Handle the LIM Latc-Verify command.
|
|
||||||||||||||||||||
|
Handle the LIM Load-Shed command.
|
|
||||||||||||||||||||
|
Handle the LIM Look-At-Me command.
|
|
||||||||||||||||||||
|
Handle the LIM Main-Feed-On command.
|
|
||||||||||||||||
|
Handle an ARR-Abort command.
|
|
||||||||||||||||
|
Handle an ARR-Response message.
|
|
||||||||||||||||
|
Configure ACD bias voltages.
|
|
||||||||||||||||
|
Configure CAL bias voltages.
|
|
||||||||||||||||
|
Configure TKR bias voltages.
|
|
||||||||||||||||
|
Handle a message on the BULK queue.
|
|
||||||||||||||||
|
Abort a calibration.
|
|
||||||||||||||||
|
Handle an 'active' calibration command.
|
|
||||||||||||||||
|
Handle a calibration completion message.
|
|
||||||||||||||||
|
Start a calibration.
|
|
||||||||||||
|
Change the value of the HV-Allowed flag.
|
|
||||||||||||
|
Change the current operating mode.
|
|
||||||||||||
|
Change the current SAA transit status.
|
|
|
Validate a LIM mode object pointer.
|
|
||||||||||||||||
|
Handle the Configure-GBM command.
|
|
||||||||||||||||
|
Handle the Configure-HV command.
|
|
||||||||||||||||
|
Handle the Configure-PID command.
|
|
|
Shutdown and delete a mode object.
|
|
||||||||||||||||
|
Handle the GBM-Calcinfo command.
|
|
||||||||||||||||
|
Handle the GBM-Closeout command.
|
|
||||||||||||||||
|
Handle a GBM-Repoint command.
|
|
||||||||||||
|
Return mode information.
|
|
||||||||||||||||
|
Handle the GRB-Confirmed command.
|
|
||||||||||||||||
|
Handle the GRB-Finished command.
|
|
||||||||||||||||
|
Handle the GRB-Suspected command.
|
|
||||||||||||||||||||
|
Handle messages arriving on the BULK queue.
|
|
||||||||||||||||
|
Handle the BULK queue messages.
|
|
||||||||||||
|
Perform actions for the CALIBRATION operating mode.
|
|
||||||||||||||||
|
Handle the Cal-Abort command.
|
|
||||||||||||||||
|
Handle an 'active' calibration command.
|
|
||||||||||||||||
|
Handle the Cal-Complete message.
|
|
||||||||||||||||
|
Handle the Cal-Start command.
|
|
||||||||||||||||||||
|
Generic command handler.
|
|
||||||||||||||||
|
Handle the GBM-Calcinfo command.
|
|
||||||||||||||||
|
Handle the GBM-Closeout command.
|
|
||||||||||||||||
|
Handle a GBM-Repoint command.
|
|
||||||||||||
|
Perform actions for the HOLD operating mode.
|
|
||||||||||||||||||||
|
Handle messages arriving on the BULK queue from the LPA task.
|
|
||||||||||||
|
Perform actions for one of the observation operating modes.
|
|
|
Perform actions within the various operating modes.
|
|
||||||||||||||||
|
Handle an 'active' physics command.
|
|
||||||||||||||||
|
Handle an 'idle' physics command.
|
|
||||||||||||||||
|
Handle the Physics-Start command.
|
|
||||||||||||||||
|
Handle the Physics-Stop command.
|
|
||||||||||||
|
Perform actions for the QUIESCENT operating mode.
|
|
||||||||||||
|
Perform actions for the TERMINAL operating mode.
|
|
||||||||||||||||
|
Enter the HOLD operating mode.
|
|
||||||||||||||||
|
Exit the HOLD operating mode.
|
|
||||||||||||||||
|
Call the LATC_cache, LATC_configure, and LATC_ignore functions.
|
|
||||||||||||||||
|
Call the LATC_capture() and LATC_consign() functions.
|
|
||||||||||||||||
|
Call the LATC_capture, LATC_verify, and LATC_consign functions.
|
|
||||||||||||||||
|
Shed LAT instrument loads.
|
|
||||||||||||||||
|
Send the Look-At-Me command.
|
|
||||||||||||||||
|
Enable the main power feed and transition to QUIESCENT mode.
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Create and initialize a new mode object.
|
|
||||||||||||||||
|
Acknowledge our existence.
|
|
||||||||||||||||
|
Handle an 'active' physics command.
|
|
||||||||||||||||
|
Handle a Physics-Complete command.
|
|
||||||||||||||||
|
Handle an 'idle' physics command.
|
|
||||||||||||||||
|
Handle a Physics-Start command.
|
|
||||||||||||||||
|
Handle a Physics-Stop command.
|
|
||||||||||||||||
|
Call the PIG_record() function.
|
|
||||||||||||||||
|
Disable power from one or more LAT instrument components.
|
|
||||||||||||||||
|
Enable power to one or more LAT instrument components.
|
|
||||||||||||||||
|
Enter the SAA.
|
|
||||||||||||||||
|
Exit the SAA.
|
|
|
Stop any ongoing LCI, LDF, LPA, and LTC activity.
|
|
|
Determine the next desired operation mode.
|
|
||||||||||||||||
|
Handle a TOO-Abort command.
|
|
||||||||||||||||
|
Start a TOO observation.
|
|
|
Allow time for a task to respond to a stop/abort command.
|
|
||||||||||||||||||||
|
Handle the LIM No-op command.
|
|
||||||||||||||||||||
|
Handle the LIM Pig-Record command.
|
|
||||||||||||||||||||
|
Handle the LIM Power-Off command.
|
|
||||||||||||||||||||
|
Handle the LIM Power-On command.
|
|
||||||||||||||||||||
|
Handle the LIM SAA-Enter command.
|
|
||||||||||||||||||||
|
Handle the LIM SAA-Exit command.
|
|
||||||||||||||||||||
|
Handle the LIM TOO-Abort command.
|
|
||||||||||||||||||||
|
Handle the LIM TOO-Start command.
|
|
|
Initial value:
{ "ARR-Abort", 2 + sizeof (LIM_ARR_Abort_Pkt), Lim_handler_arr_abort }
|
|
|
Initial value:
{ "ARR-Response",
2 + sizeof (LIM_ARR_Response_Pkt),
Lim_handler_arr_response }
|
|
|
Initial value:
{ "Bias-ACD", 2 + sizeof (LIM_Bias_ACD_Pkt), Lim_handler_bias_acd }
|
|
|
Initial value:
{ "Bias-CAL", 2 + sizeof (LIM_Bias_CAL_Pkt), Lim_handler_bias_cal }
|
|
|
Initial value:
{ "Bias-TKR", 2 + sizeof (LIM_Bias_TKR_Pkt), Lim_handler_bias_tkr }
|
|
|
Initial value:
{ "BULK queue message", 0, Lim_handler_bulk }
|
|
|
Initial value:
{ "Calibration-Abort", 0, Lim_handler_cal_abort }
|
|
|
Initial value:
{ "Calibration-Active", 0, Lim_handler_cal_active }
|
|
|
Initial value:
{ "Calibration-Complete", 0, Lim_handler_cal_complete }
|
|
|
Initial value:
{ "Calibration-Start", 0, Lim_handler_cal_start }
|
|
|
Initial value:
{ "Configure-GBM",
2 + sizeof (LIM_Config_GBM_Pkt),
Lim_handler_config_gbm }
|
|
|
Initial value:
{ "Configure-HV", 2 + sizeof (LIM_Config_HV_Pkt), Lim_handler_config_hv }
|
|
|
Initial value:
{ "Configure-PID",
2 + sizeof (LIM_Config_PID_Pkt),
Lim_handler_config_pid }
|
|
|
Initial value:
{ "GBM-Calcinfo", 1000, Lim_handler_gbm_calcinfo }
|
|
|
Initial value:
{ "GBM-Closeout", 1000, Lim_handler_gbm_closeout }
|
|
|
Initial value:
{ "GBM-Repoint", 1000, Lim_handler_gbm_repoint }
|
|
|
Initial value:
{ "GRB-Confirmed", 1000, Lim_handler_grb_confirmed }
|
|
|
Initial value:
{ "GRB-Finished", 1000, Lim_handler_grb_finished }
|
|
|
Initial value:
{ "GRB-Suspected", 1000, Lim_handler_grb_suspected }
|
|
|
Initial value:
{ "Hold-Enter", 2 + sizeof (LIM_Hold_Enter_Pkt), Lim_handler_hold_enter }
|
|
|
Initial value:
{ "Hold-Exit", 2 + sizeof (LIM_Hold_Exit_Pkt), Lim_handler_hold_exit }
|
|
|
Initial value:
{ "Latc-Config",
2 + sizeof (LIM_Latc_Config_Pkt),
Lim_handler_latc_config }
|
|
|
Initial value:
{ "Latc-Record",
2 + sizeof (LIM_Latc_Record_Pkt),
Lim_handler_latc_record }
|
|
|
Initial value:
{ "Latc-Verify",
2 + sizeof (LIM_Latc_Verify_Pkt),
Lim_handler_latc_verify }
|
|
|
Initial value:
{ "Load-Shed", 2 + sizeof (LIM_Load_Shed_Pkt), Lim_handler_load_shed }
|
|
|
Initial value:
{ "Look-At-Me", 2 + sizeof (LIM_Look_At_Me_Pkt), Lim_handler_look_at_me }
|
|
|
Initial value:
{ "Main-Feed-On",
2 + sizeof (LIM_Main_Feed_On_Pkt),
Lim_handler_main_feed_on }
|
|
|
Initial value:
{ "No-Op", 2 + sizeof (LIM_Noop_Pkt), Lim_handler_noop }
|
|
|
Initial value:
{ "Physics-Active", 0, Lim_handler_physics_active }
|
|
|
Initial value:
{ "Physics-Complete", 1000, Lim_handler_physics_complete }
|
|
|
Initial value:
{ "Physics-Idle", 0, Lim_handler_physics_idle }
|
|
|
Initial value:
{ "Physics-Start", 1000, Lim_handler_physics_start }
|
|
|
Initial value:
{ "Physics-Stop", 1000, Lim_handler_physics_stop }
|
|
|
Initial value:
{ "Pig-Record", 2 + sizeof (LIM_Pig_Record_Pkt), Lim_handler_pig_record }
|
|
|
Initial value:
{ "Power-Off", 2 + sizeof (LIM_Power_Off_Pkt), Lim_handler_power_off }
|
|
|
Initial value:
{ "Power-On", 2 + sizeof (LIM_Power_On_Pkt), Lim_handler_power_on }
|
|
|
Initial value:
{ "SAA-Enter", 2 + sizeof (LIM_SAA_Enter_Pkt), Lim_handler_saa_enter }
|
|
|
Initial value:
{ "SAA-Exit", 2 + sizeof (LIM_SAA_Exit_Pkt), Lim_handler_saa_exit }
|
|
|
Initial value:
{ "TOO-Abort", 2 + sizeof (LIM_TOO_Abort_Pkt), Lim_handler_too_abort }
|
|
|
Initial value:
{ "TOO-Start", 2 + sizeof (LIM_TOO_Start_Pkt), Lim_handler_too_start }
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL , lim_mode_arr_abort },
{ LIM_OP_MODE_QUIESCENT, lim_mode_arr_abort },
{ LIM_OP_MODE_CALIBRATION, lim_mode_arr_abort },
{ LIM_OP_MODE_PHYSICS, lim_mode_arr_abort },
{ LIM_OP_MODE_TOO, lim_mode_arr_abort },
{ LIM_OP_MODE_ARR, lim_mode_arr_abort },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_arr_response },
{ LIM_OP_MODE_QUIESCENT, lim_mode_arr_response },
{ LIM_OP_MODE_CALIBRATION, lim_mode_arr_response },
{ LIM_OP_MODE_PHYSICS, lim_mode_arr_response },
{ LIM_OP_MODE_TOO, lim_mode_arr_response },
{ LIM_OP_MODE_ARR, lim_mode_arr_response },
{ LIM_OP_MODE_HOLD, lim_mode_arr_response },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_bias_acd },
{ LIM_OP_MODE_TOO, lim_mode_bias_acd },
{ LIM_OP_MODE_ARR, lim_mode_bias_acd },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_bias_cal },
{ LIM_OP_MODE_TOO, lim_mode_bias_cal },
{ LIM_OP_MODE_ARR, lim_mode_bias_cal },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_bias_tkr },
{ LIM_OP_MODE_TOO, lim_mode_bias_tkr },
{ LIM_OP_MODE_ARR, lim_mode_bias_tkr },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_bulk },
{ LIM_OP_MODE_QUIESCENT, lim_mode_bulk },
{ LIM_OP_MODE_CALIBRATION, lim_mode_bulk },
{ LIM_OP_MODE_PHYSICS, lim_mode_bulk },
{ LIM_OP_MODE_TOO, lim_mode_bulk },
{ LIM_OP_MODE_ARR, lim_mode_bulk },
{ LIM_OP_MODE_HOLD, lim_mode_bulk },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_cal_abort },
{ LIM_OP_MODE_CALIBRATION, lim_mode_cal_abort },
{ LIM_OP_MODE_PHYSICS, lim_mode_cal_abort },
{ LIM_OP_MODE_TOO, lim_mode_cal_abort },
{ LIM_OP_MODE_ARR, lim_mode_cal_abort },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_CALIBRATION, lim_mode_cal_active },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_cal_complete },
{ LIM_OP_MODE_QUIESCENT, lim_mode_cal_complete },
{ LIM_OP_MODE_CALIBRATION, lim_mode_cal_complete },
{ LIM_OP_MODE_PHYSICS, lim_mode_cal_complete },
{ LIM_OP_MODE_TOO, lim_mode_cal_complete },
{ LIM_OP_MODE_ARR, lim_mode_cal_complete },
{ LIM_OP_MODE_HOLD, lim_mode_cal_complete },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_cal_start },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_config_gbm },
{ LIM_OP_MODE_QUIESCENT, lim_mode_config_gbm },
{ LIM_OP_MODE_CALIBRATION, lim_mode_config_gbm },
{ LIM_OP_MODE_PHYSICS, lim_mode_config_gbm },
{ LIM_OP_MODE_TOO, lim_mode_config_gbm },
{ LIM_OP_MODE_ARR, lim_mode_config_gbm },
{ LIM_OP_MODE_HOLD, lim_mode_config_gbm },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_config_hv },
{ LIM_OP_MODE_QUIESCENT, lim_mode_config_hv },
{ LIM_OP_MODE_CALIBRATION, lim_mode_config_hv },
{ LIM_OP_MODE_PHYSICS, lim_mode_config_hv },
{ LIM_OP_MODE_TOO, lim_mode_config_hv },
{ LIM_OP_MODE_ARR, lim_mode_config_hv },
{ LIM_OP_MODE_HOLD, lim_mode_config_hv },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_config_pid },
{ LIM_OP_MODE_QUIESCENT, lim_mode_config_pid },
{ LIM_OP_MODE_CALIBRATION, lim_mode_config_pid },
{ LIM_OP_MODE_PHYSICS, lim_mode_config_pid },
{ LIM_OP_MODE_TOO, lim_mode_config_pid },
{ LIM_OP_MODE_ARR, lim_mode_config_pid },
{ LIM_OP_MODE_HOLD, lim_mode_config_pid },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_gbm_calcinfo },
{ LIM_OP_MODE_QUIESCENT, lim_mode_gbm_calcinfo },
{ LIM_OP_MODE_CALIBRATION, lim_mode_gbm_calcinfo },
{ LIM_OP_MODE_PHYSICS, lim_mode_gbm_calcinfo },
{ LIM_OP_MODE_TOO, lim_mode_gbm_calcinfo },
{ LIM_OP_MODE_ARR, lim_mode_gbm_calcinfo },
{ LIM_OP_MODE_HOLD, lim_mode_gbm_calcinfo },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_gbm_closeout },
{ LIM_OP_MODE_QUIESCENT, lim_mode_gbm_closeout },
{ LIM_OP_MODE_CALIBRATION, lim_mode_gbm_closeout },
{ LIM_OP_MODE_PHYSICS, lim_mode_gbm_closeout },
{ LIM_OP_MODE_TOO, lim_mode_gbm_closeout },
{ LIM_OP_MODE_ARR, lim_mode_gbm_closeout },
{ LIM_OP_MODE_HOLD, lim_mode_gbm_closeout },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_gbm_repoint },
{ LIM_OP_MODE_QUIESCENT, lim_mode_gbm_repoint },
{ LIM_OP_MODE_CALIBRATION, lim_mode_gbm_repoint },
{ LIM_OP_MODE_PHYSICS, lim_mode_gbm_repoint },
{ LIM_OP_MODE_TOO, lim_mode_gbm_repoint },
{ LIM_OP_MODE_ARR, lim_mode_gbm_repoint },
{ LIM_OP_MODE_HOLD, lim_mode_gbm_repoint },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_grb_confirmed },
{ LIM_OP_MODE_QUIESCENT, lim_mode_grb_confirmed },
{ LIM_OP_MODE_CALIBRATION, lim_mode_grb_confirmed },
{ LIM_OP_MODE_PHYSICS, lim_mode_grb_confirmed },
{ LIM_OP_MODE_ARR, lim_mode_grb_confirmed },
{ LIM_OP_MODE_TOO, lim_mode_grb_confirmed },
{ LIM_OP_MODE_HOLD, lim_mode_grb_confirmed },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_grb_finished },
{ LIM_OP_MODE_QUIESCENT, lim_mode_grb_finished },
{ LIM_OP_MODE_CALIBRATION, lim_mode_grb_finished },
{ LIM_OP_MODE_PHYSICS, lim_mode_grb_finished },
{ LIM_OP_MODE_ARR, lim_mode_grb_finished },
{ LIM_OP_MODE_TOO, lim_mode_grb_finished },
{ LIM_OP_MODE_HOLD, lim_mode_grb_finished },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_grb_suspected },
{ LIM_OP_MODE_QUIESCENT, lim_mode_grb_suspected },
{ LIM_OP_MODE_CALIBRATION, lim_mode_grb_suspected },
{ LIM_OP_MODE_PHYSICS, lim_mode_grb_suspected },
{ LIM_OP_MODE_ARR, lim_mode_grb_suspected },
{ LIM_OP_MODE_TOO, lim_mode_grb_suspected },
{ LIM_OP_MODE_HOLD, lim_mode_grb_suspected },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_hold_enter },
{ LIM_OP_MODE_CALIBRATION, lim_mode_hold_enter },
{ LIM_OP_MODE_PHYSICS, lim_mode_hold_enter },
{ LIM_OP_MODE_TOO, lim_mode_hold_enter },
{ LIM_OP_MODE_ARR, lim_mode_hold_enter },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_HOLD, lim_mode_hold_exit },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_latc_config },
{ LIM_OP_MODE_TOO, lim_mode_latc_config },
{ LIM_OP_MODE_ARR, lim_mode_latc_config },
{ LIM_OP_MODE_HOLD, lim_mode_latc_config },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_latc_record },
{ LIM_OP_MODE_TOO, lim_mode_latc_record },
{ LIM_OP_MODE_ARR, lim_mode_latc_record },
{ LIM_OP_MODE_HOLD, lim_mode_latc_record },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_latc_verify },
{ LIM_OP_MODE_TOO, lim_mode_latc_verify },
{ LIM_OP_MODE_ARR, lim_mode_latc_verify },
{ LIM_OP_MODE_HOLD, lim_mode_latc_verify },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_load_shed },
{ LIM_OP_MODE_QUIESCENT, lim_mode_load_shed },
{ LIM_OP_MODE_CALIBRATION, lim_mode_load_shed },
{ LIM_OP_MODE_PHYSICS, lim_mode_load_shed },
{ LIM_OP_MODE_TOO, lim_mode_load_shed },
{ LIM_OP_MODE_ARR, lim_mode_load_shed },
{ LIM_OP_MODE_HOLD, lim_mode_load_shed },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_look_at_me },
{ LIM_OP_MODE_CALIBRATION, lim_mode_look_at_me },
{ LIM_OP_MODE_PHYSICS, lim_mode_look_at_me },
{ LIM_OP_MODE_TOO, lim_mode_look_at_me },
{ LIM_OP_MODE_ARR, lim_mode_look_at_me },
{ LIM_OP_MODE_HOLD, lim_mode_look_at_me },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_main_feed_on },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_noop },
{ LIM_OP_MODE_QUIESCENT, lim_mode_noop },
{ LIM_OP_MODE_CALIBRATION, lim_mode_noop },
{ LIM_OP_MODE_PHYSICS, lim_mode_noop },
{ LIM_OP_MODE_TOO, lim_mode_noop },
{ LIM_OP_MODE_ARR, lim_mode_noop },
{ LIM_OP_MODE_HOLD, lim_mode_noop },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_PHYSICS, lim_mode_physics_active },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_physics_complete },
{ LIM_OP_MODE_QUIESCENT, lim_mode_physics_complete },
{ LIM_OP_MODE_CALIBRATION, lim_mode_physics_complete },
{ LIM_OP_MODE_PHYSICS, lim_mode_physics_complete },
{ LIM_OP_MODE_TOO, lim_mode_physics_complete },
{ LIM_OP_MODE_ARR, lim_mode_physics_complete },
{ LIM_OP_MODE_HOLD, lim_mode_physics_complete },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_physics_idle },
{ LIM_OP_MODE_QUIESCENT, lim_mode_physics_idle },
{ LIM_OP_MODE_CALIBRATION, lim_mode_physics_idle },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_physics_start },
{ LIM_OP_MODE_TOO, lim_mode_physics_start },
{ LIM_OP_MODE_ARR, lim_mode_physics_start },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_physics_stop },
{ LIM_OP_MODE_CALIBRATION, lim_mode_physics_stop },
{ LIM_OP_MODE_PHYSICS, lim_mode_physics_stop },
{ LIM_OP_MODE_TOO, lim_mode_physics_stop },
{ LIM_OP_MODE_ARR, lim_mode_physics_stop },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_pig_record },
{ LIM_OP_MODE_CALIBRATION, lim_mode_pig_record },
{ LIM_OP_MODE_PHYSICS, lim_mode_pig_record },
{ LIM_OP_MODE_TOO, lim_mode_pig_record },
{ LIM_OP_MODE_ARR, lim_mode_pig_record },
{ LIM_OP_MODE_HOLD, lim_mode_pig_record },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_power_off },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_power_on },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_saa_enter },
{ LIM_OP_MODE_QUIESCENT, lim_mode_saa_enter },
{ LIM_OP_MODE_CALIBRATION, lim_mode_saa_enter },
{ LIM_OP_MODE_PHYSICS, lim_mode_saa_enter },
{ LIM_OP_MODE_TOO, lim_mode_saa_enter },
{ LIM_OP_MODE_ARR, lim_mode_saa_enter },
{ LIM_OP_MODE_HOLD, lim_mode_saa_enter },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_TERMINAL, lim_mode_saa_exit },
{ LIM_OP_MODE_QUIESCENT, lim_mode_saa_exit },
{ LIM_OP_MODE_CALIBRATION, lim_mode_saa_exit },
{ LIM_OP_MODE_PHYSICS, lim_mode_saa_exit },
{ LIM_OP_MODE_TOO, lim_mode_saa_exit },
{ LIM_OP_MODE_ARR, lim_mode_saa_exit },
{ LIM_OP_MODE_HOLD, lim_mode_saa_exit },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_too_abort },
{ LIM_OP_MODE_CALIBRATION, lim_mode_too_abort },
{ LIM_OP_MODE_PHYSICS, lim_mode_too_abort },
{ LIM_OP_MODE_TOO, lim_mode_too_abort },
{ LIM_OP_MODE_ARR, lim_mode_too_abort },
{ -1, NULL },
}
|
|
|
Initial value:
{
{ LIM_OP_MODE_QUIESCENT, lim_mode_too_start },
{ LIM_OP_MODE_PHYSICS, lim_mode_too_start },
{ LIM_OP_MODE_ARR, lim_mode_too_start },
{ -1, NULL },
}
|
 1.4.4
1.4.4