GLAST/LAT > DAQ and FSW > FSW > Doxygen Index > GRBP / V0-2-0
Constituent: grbpsiu Tag: sun-gcc
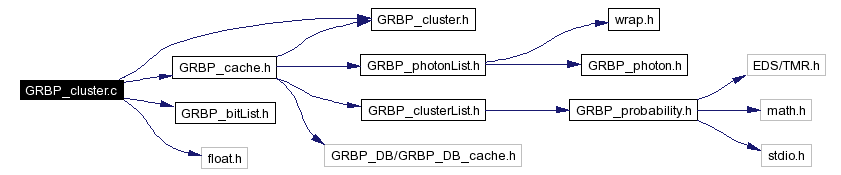
#include "GRBP_cluster.h"
#include "GRBP_cache.h"
#include "GRBP_bitList.h"
#include <float.h>
Include dependency graph for GRBP_cluster.c:
Defines | |
| #define | report_prms(_min_idx,_max_idx,_max,_pdists,_hi_pdists, _lo_pdists,_pdts,_hi_pdts,_lo_pdts,_j,_logP_sum,_threshold) |
| #define | report_masks(_title, _masks, _nmasks) |
Functions | |
| static __inline void | masksFill (unsigned int *masks, unsigned int nrange, const GRBP_neighborList *nl, int beg, int end, int max) |
| Creates a bit mask representation of the photons in the neighbor list. | |
| int | GRBP_clusterGammasFill (const GRBP_cluster *clusters, int beg, int end, int max, const unsigned short int *list, int cnt, double contrast, double threshold, unsigned int *masks, int nbits, GRBP_probabilityLogs *plog_max) |
| Scans the circular list of clusters looking for clusters that are over the probability threshold. A list of photons that are members of such clusters is accumulated (in the form of a bit list) and returned in masks. | |
CVS $Id: GRBP_cluster.c,v 1.3 2007/08/02 17:24:59 russell Exp $
The cluster is the object used to detect a GRB. It has almost no role in locating a GRB. It is really a pattern recognition object. Each input photon acts a the parent of a cluster. A cluster is formed around that parent photon by photons that are within a configurable angular distance from the parent. When a new photon arrives, the previous N photons are checked. When a new photon arrives, the oldest photon in the cluster is retired and replaced with the new photon. This continues until the parent photon itself is retired.
When a photon is added to the cluster, its probability of being within the specified angular distance and within the time (based on the background rate) is computed. The sum of all the spatial and temporal probabilities gives a measure of the likelihood that this photon and its neighbors are from a GRB.
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
Scans the circular list of clusters looking for clusters that are over the probability threshold. A list of photons that are members of such clusters is accumulated (in the form of a bit list) and returned in masks. { printf ("*\n") ; break; } { printf ("**\n"); break; } printf ("\n"); |
|
||||||||||||||||||||||||||||
|
Creates a bit mask representation of the photons in the neighbor list.
|
 1.4.4
1.4.4