GLAST/LAT > DAQ and FSW > FSW > Doxygen Index > ATT / V1-1-1
Constituent: att Tag: rad750
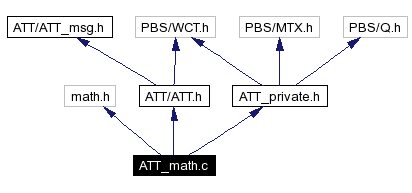
#include "math.h"
#include "ATT/ATT.h"
#include "ATT_private.h"
Include dependency graph for ATT_math.c:
Vector Transform Functions | |
| void | ATT_xform_vec_by_quat (double *Ve, const double *Q, const double *Vl) |
| Tranform vector coordinates from LAT to J2000. | |
Quaternion Utility Functions | |
| void | ATT_quat_multiply (double *Qr, const double *Qa, const double *Qb) |
| Multiply two quaternions. | |
| double | ATT_quat_magnitude (const double *Q) |
| Get a quaternion magnitude. | |
| void | ATT_quat_normalize (double *Q) |
| Normallize a quaternion. | |
| void | ATT_quat_conjugate (double *Qr, const double *Qa) |
| Get a quaternion conjugate. | |
Vectory Utility Functions | |
| double | ATT_vec_magnitude (const double *V) |
| Get a vector magnitude. | |
| void | ATT_vec_normalize (double *V) |
| Normallize a vector. | |
Functions | |
| void | vector_2_longlat (const double *v, double *longitude, double *latitude) |
| Routine to convert cartesian coordinates to longitude-latitude like angular coordinates. | |
| void | ATT_vec_cart_to_sphr_deg (const double *Vc, double *Vs) |
| Transform a cartesian vector to spherical (ra,dec) coordinates (degrees). | |
| void | ATT_vec_cart_to_sphr_rad (const double *Vc, double *Vs) |
| Transform a cartesian vector to spherical (ra,dec) coordinates (radians). | |
|
||||||||||||
|
Get a quaternion conjugate. Returns the conjugate of quaternion Qa in Qr.
|
|
|
Get a quaternion magnitude. Returns the magnitude of quaternion Q.
|
|
||||||||||||||||
|
Multiply two quaternions. Multilplies the quaternion Qa by quaternion Qb and stores the result in Qr. Qr = Qb x Qa. This operation is not commutative.
|
|
|
Normallize a quaternion. Modifies quaternion Q so that the result has magnitude '1'. This function works in place.
|
Here is the call graph for this function:

|
||||||||||||
|
Transform a cartesian vector to spherical (ra,dec) coordinates (degrees). Transforms the vector Vc in (x,y,z) cartesian coordinates into the vector Vs in (ra,dec) spherical coordinates. Vs is returned in degrees.
|
Here is the call graph for this function:

|
||||||||||||
|
Transform a cartesian vector to spherical (ra,dec) coordinates (radians). Transforms the vector Vc in (x,y,z) cartesian coordinates into the vector Vs in (ra,dec) spherical coordinates. Vs is returned in radians.
|
Here is the call graph for this function:

|
|
Get a vector magnitude. Returns the magnitude of vector V.
|
|
|
Normallize a vector. Modifies vector V so that the result has magnitude '1'. This function works in place.
|
Here is the call graph for this function:

|
||||||||||||||||
|
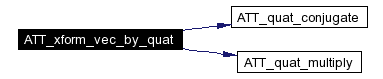
Tranform vector coordinates from LAT to J2000. Performs coordinate transformation on the vector Vl, which is assumed to be a cartiesian vector in LAT instrument local coordinates (SC body coordinates). The information in quaternion Q is used to transform the vector coordinates into J2000 (ECI) coordinates. The resulting vector coordinates are stored in Ve.
|
Here is the call graph for this function:
|
||||||||||||||||
|
Routine to convert cartesian coordinates to longitude-latitude like angular coordinates. Adopted from ARGOS/USA ground processing code.
|
 1.3.3
1.3.3